Real Time 4WD
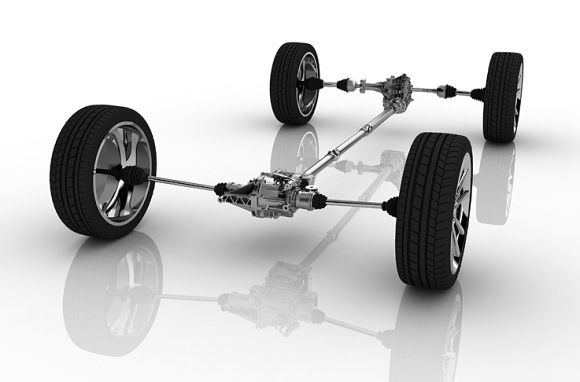
Real Time 4WD je systém pohonu všech kol, který používá např. Honda HR-V. Při normální jízdě jsou poháněna pouze přední kola. Pokud však začnou ztrácet trakci, systém Real Time 4WD začne přenášet výkon i na zadní kola.
Real Time 4WD je označení systému pohonu všech kol používané automobilkou Honda. Tento systém využívá stejných principů jako koncernové „čtyřkolky“ se spojkou Haldex. Při běžném provozu jsou většinou poháněná pouze přední kola. Tím se snižují ztráty v převodech a snižuje se spotřeba. Pokud začnou přední kola ztrácet trakci, systém Real Time 4WD začne přenášet výkon také na zadní kola. K tomu využívá spojkovou jednotku integrovanou v zadním diferenciálu. Tato jednotka je vybavena dvěma hydraulickými čerpadly (Dual Pump unit), z nichž jedno je přes převodovku a hnací hřídel poháněno předními koly, zatímco druhé čerpadlo je poháněno zadními koly prostřednictvím zadního diferenciálu.

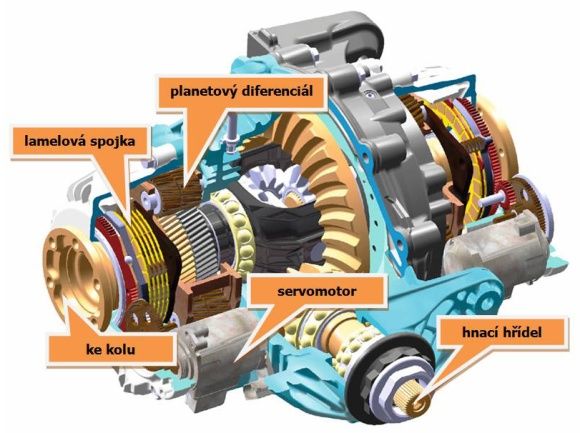
spojková jednotka systému Real Time 4WD
Princip
Jedno z čerpadel je poháněno předními koly, druhé čerpadlo prostřednictvím zadního diferenciálu koly zadními. Na suchém povrchu se přední i zadní kola otáčejí stejnou rychlostí, což znamená, že obě čerpadla pracují také stejně a vytvářejí stejný tlak. Tlak kapaliny vytvořený předním čerpadlem je vyrovnáván stejně velkým tlakem vyvolaným zadním čerpadlem. Pokud se přední kola začnou v důsledku prokluzu otáčet rychleji, změní se i rychlost otáčení hydraulických čerpadel a vznikne hydraulický tlak. Tento tlak odpovídá rozdílu jejich otáček a je přenášen na vícelamelovou spojku, která spojí hnací hřídel s diferenciálem zadní nápravy. Zadní diferenciál následně přenese na zadní kola takové množství točivého momentu, jaké je zapotřebí pro dosažení trakce.
Text: Jan Sajdl
Foto: www.honda.cz
Klíčová slova: pohon všech kol, 4×4, Haldex, Honda, Real Time 4WD